Swin_Transformer_Hierarchical_Vision_Transformer_Using_Shifted_Windows 【图像分类、目标检测、语义分割】 ICCV
摘要
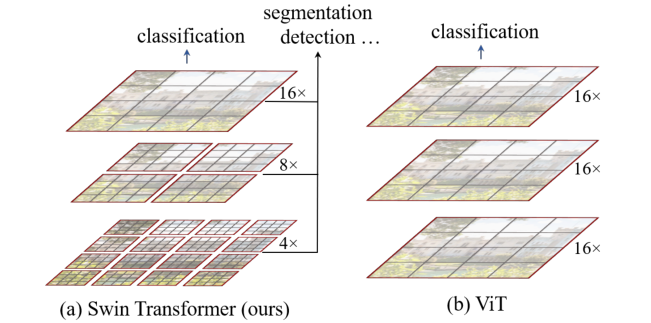
SwinTransformer 同样是一篇尝试探索如何将 NLP 领域的 transformer 迁移到 CV 领域的工作,其指出,文字的密度和图像的像素密度差距较大,直接迁移如 VIT 将会产生大图像难以计算的问题,因此 swinTransformer 提出了一种层级式的计算方式,不仅将计算复杂度降低了很多,同时提取到了不同尺度的特征,解决了 VIT 的大尺寸图像处理困难、任务场景较为单一等问题。
概览
创新
- 使用基于 Window 的 MSA 来进行大尺寸图像的分割处理,降低 transformer 的计算复杂度,使 transformer 可以计算大尺寸的图像
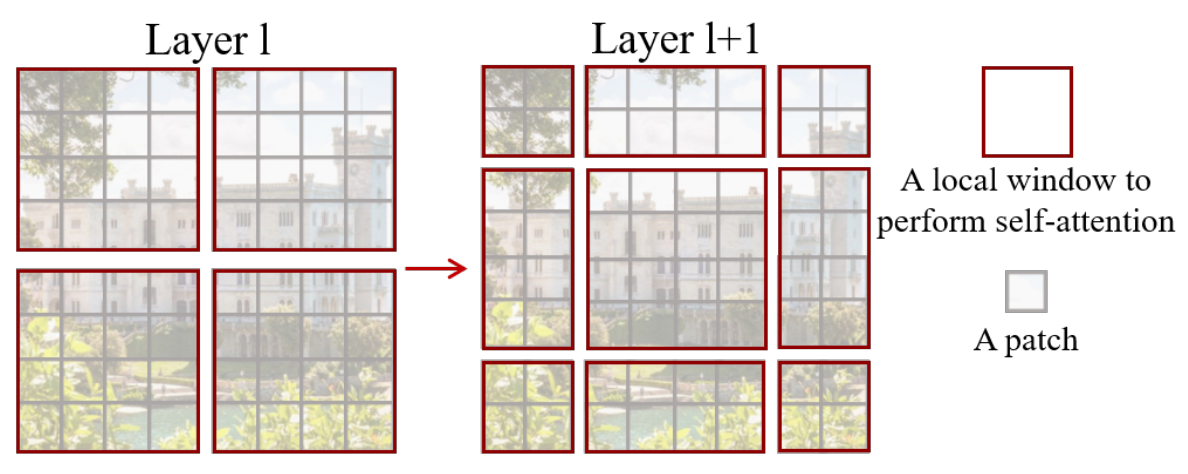
- 使用 shift Window 来加强不同 window 之间的通信,使全局的信息更容易被学习
- 通过 patch merging 获得多尺度的信息,以此产生不同的感受野,适应了多种任务场景构造特征图的需要
- 构造了掩码,用以加速当 shift window 产生大小不同的 Windows 时的额外的 padding 计算
网络
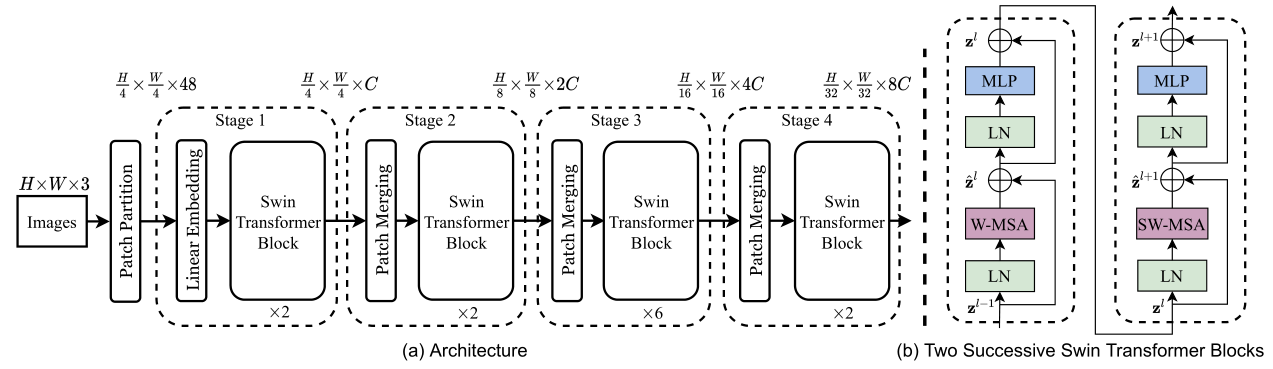
由于 swinTransformer 提出的是一种通用架构,所以这里的网络模型并没有给出具体到分类 / 分割 / 检测应该如何继续实现,事实上直接按照常见的实现方式,分类用 1x1 Conv,分割用 Unet,检测用 pyramid feature。这里的输入是每个 window 的输入,每个 Swin Transformer Block 都会产生一个输出,Patch Merging 是下采样操作,类似于 pixel shuffle,接下来按照前向过程逐步分析一下网络的实现。
patch embedding
这一部分主要是预处理,将图片打成不同的 patch,并且把 patch 拉平,作用和 VIT 的一样,但是由于 swinTransformer 将其进一步分成了不同的 window,因此略有细节上的不同。
patch partition
对于输入的图像 image $H\times W$(Swin-T 中图像大小为 224x224),按照每个 patch 为 $P\times P$ 切分为多个 patch,在标准 swinTransformer 中,$P=4$。此时每个 patch 中有 $P\times P\times 3$ 个值,Swin-T 中这里为 48,。因此共有 $\frac{H}{4}\times \frac{W}{4}$ 个 patch,每个 patch 48 个值。
linear embedding
接下来和 VIT 一致,通过一个 linear layer 将 48 映射到 transformer 接受的维度 $C$,在 Swin-T 中为 96,此时我们拿到了 56x56 个 patch,每个 patch 96 维,也即 $\frac{H}{4}\times \frac{W}{4}\times C$。
Swin Transformer block
这里的部分是整个工作最重要的部分,在这里讲述了窗口自注意力机制的计算方式,以及如何进行 shift window,包括之后的移位回位以及掩码设置。整体来说,对于上一个输入 $Z^{i-1}$,需要经过 $\rm LayerNorm, WMSA,Add,SWMSA,MLP$ 这些操作才能得到 $Z^{i+1}$。也就是每一个 swinTransformerBlock 需要做两次自注意力的计算。具体地,这个过程可以用如下公式表示,其中 $\hat Z$ 是中间变量:
W-MSA
这是整个 swinTransformer 里面最核心的部分,后面的 shift window 只不过是多加了一个移位的操作后处理了一下额外计算量。回到之前我们得到的输入,这时候我们拿到的输入维度是 $\frac{H}{4}\times \frac{W}{4}\times C$,在 Swin-T 中,这里也达到了 3136x96 的级别,而 3136 的序列长度对于 transformer 来说,复杂度太高,因此将其切分成 window。
在切分 window 的时候,每个 window 有固定 7x7=49 个 patch,这 49 个 patch 线性排列,形成 $\frac{H}{28}\times \frac{W}{28}$ 个 window,每个 window 序列维度为 $(49,C)$ ,接下来对每个 window 做 self-attention。这里的 SA 操作在一些实现细节上略有区别于 VIT 和 标准transformer,首先是 $Q,K,V$ 的维度,这里的 $W_{Q/K/V}$ 矩阵维度为 $(C,\frac C {heads})$,因此,得到的 $Z\to (49, \frac C {heads}),Z_{mix}\to (49,C)$。这样得到的 $Z_{mix}$ 再和 VIT 一样经过一个 linear,不过这里的 linear 是 $C\to C$ 的,其余操作和 VIT 无异。这样输出的结果维度仍然为 $\frac{H}{4}\times \frac{W}{4}\times C$。
1 | class WindowAttention(nn.Module): |
SW-MSA
shift window multi-head self attention 是这项工作最创新的地方,事实上,如果删除了 shift window,这项工作在发表之前很短时间恰好有一篇 PVT 的工作通过堆叠不重合窗口实现大图像 transformer。当然,swinTransformer 具备更全的应用范围,更优的实验设计,仍然会成为一项颠覆性的工作。
整体来说,SW-MSA 首先进行窗口的移动,准确来说是分割线移动 1/2 个 window_size(Swin-T 中是7/2=3),这样会产生与之前不同的窗口,并且新窗口的范围和旧窗口范围有部分重叠,然后在新窗口上做 W-MSA即可,但是这样的话会产生更多的窗口,并且会产生非 7x7 的窗口,一种产生这种 “不规整情况” 的示意图如下:
这种不规则将会给批处理图像带来极大的困难,一种普通的想法是采用 padding 策略,对不同的 window 都补 0 成 7x7,但这样增加了很多计算量。swinTransformer 没有选择采用 padding 策略修补这些窗口,而是采用了一种巧妙的移位。一个完整的 SW-MSA 工作流程如下:
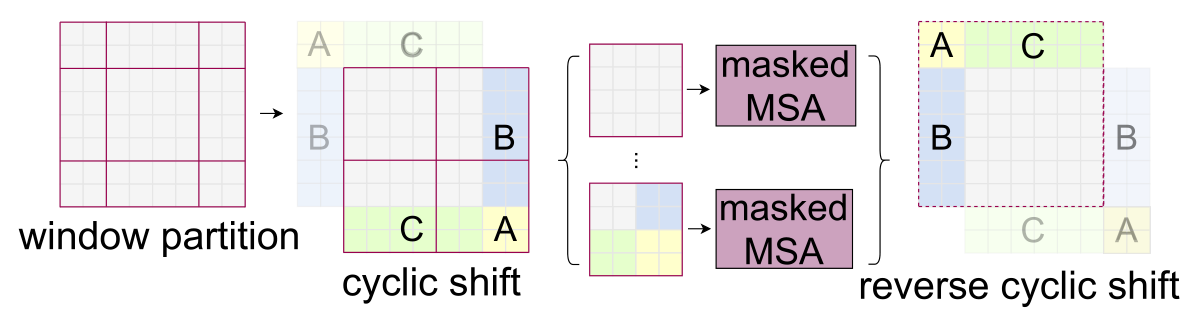
在这个过程中,cyclic shift 和 reverse cyclic shift 操作直接采用数组切片即可完成,这里主要难以理解的是 masked MSA,即为什么要用掩码,以及怎么赋值掩码矩阵?
至于为什么要用到掩码,这是因为在 cyclic shift 形成的新四个窗口中,对于左下、右上、右下的窗口,他们都含有图像不相邻位置的像素,这些像素可能实际上没有任何关联,如左下角的上半部分可能是草原,而其下半部分可能是上面移过来的天空。这种情况下他们是不应该互相进行计算注意力的 ,然而我们只要用 W-MSA 就一定会计算他们之间的注意力,所以我们需要给一个 mask,让我们不需要计算的部分消失掉。
对于这四种情况,在进行 SA 之后会得到四种不同的值分布,如下图所示:
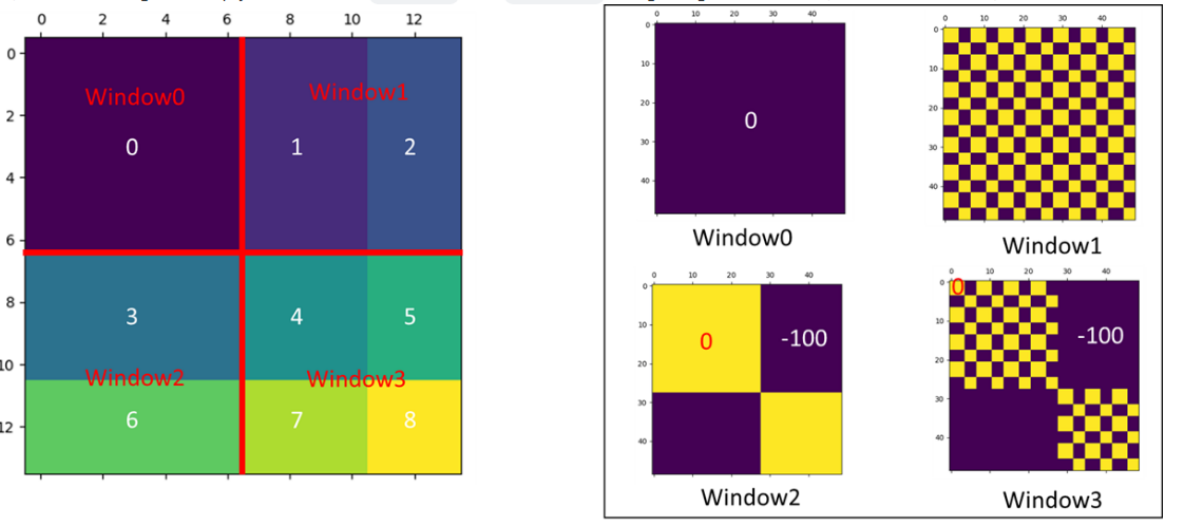
在右边这几幅小图中,赋 0 的位置表示我们希望保留的计算,赋 -100 的位置表示我们希望忽略的计算,这些 mask 将会作用于 $\rm softmax(\frac{QK^T}{\sqrt d_k} + mask)$,此时 -100 将会经过 $\rm softmax$ 变成 0,从而消除其掩码所在位置的影响。
Add & LayerNorm & MLP
这些无论和 VIT 还是和 transformer 都没有任何区别,不再赘述。
patch merging
这里的 patch merging 就是一个单纯的降采样的过程,其操作和 pixel shuffle 基本一致,其具体的方法和操作流程如下图:
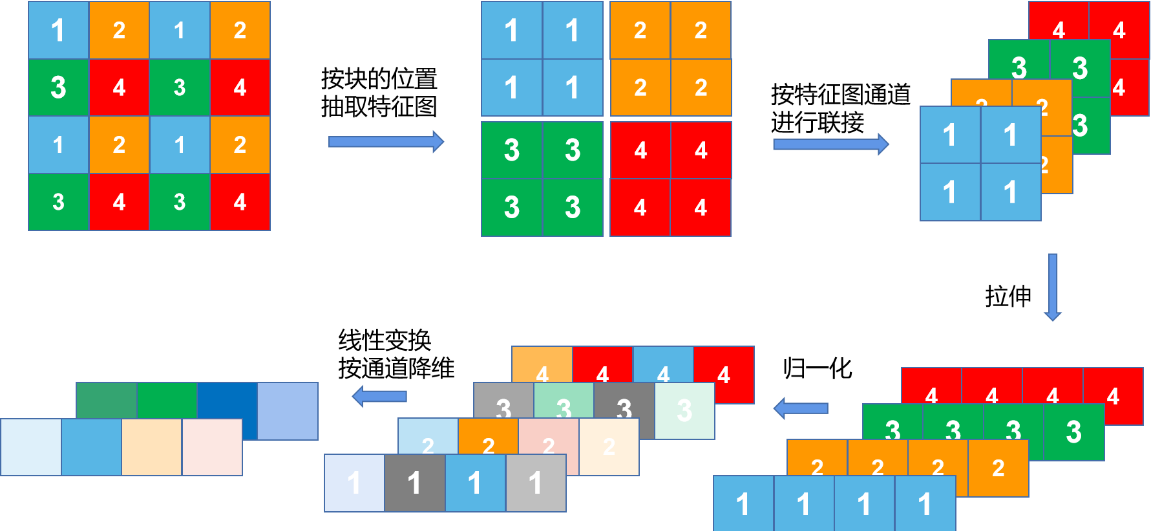
我们可以看到,patch merging 将原本 4x4x1 的 tensor 变成了 2x2x2 的 tensor,具体来说使长宽小一半,通道加一倍,从而达到降采样的目的,swinTransformer 中总共进行了 3 次 patch merging,将 $\frac{H}{4}\times \frac{W}{4}\times C$ 最终变成了 $\frac{H}{32}\times \frac{W}{32}\times 8C$。这样的操作使感受野逐渐增大,从而感知不同尺寸的图片信息,更广泛地应用于更多任务。
1 | class PatchMerging(nn.Module): |
损失
swinTransformer 在多个应用领域均取得了超越 SOTA 的指标,由于其在多个领域都做了应用,因此根据不同的实现目标选择了不同的损失函数。
启发
总而言之,swinTransformer 相对于 VIT 来说,进一步激发了 VIT 在视觉领域的潜力,将其扩展到了更多的任务,并在各种任务上面都成为了 SOTA,对 VIT 的改编无疑是巨大的成功,目前基于 CNN 的 SOTA 已经很难找到了。但这项工作同时有着一定的局限性,由于其是 VIT 在视觉领域的改编,其借鉴了很多 CV 的先验知识,尤其是很多之前 CNN 架构的处理方法,这意味着 transformer 在 NLP 到 CV 领域的迁移还没有完全性地实现,如何像 VIT 一样,在几乎不对网络结构做 CV/NLP 方向的特殊适应的情况下,直接修改数据结构就可以一个网络做多个任务,这是 swinTransformer 的团队挖出的一个大坑,也许会有下一个颠覆性的工作完成这项预期。