Masked Autoencoders Are Scalable Vision Learners 【图像分类、语义分割、目标检测】 CVPR2022
摘要
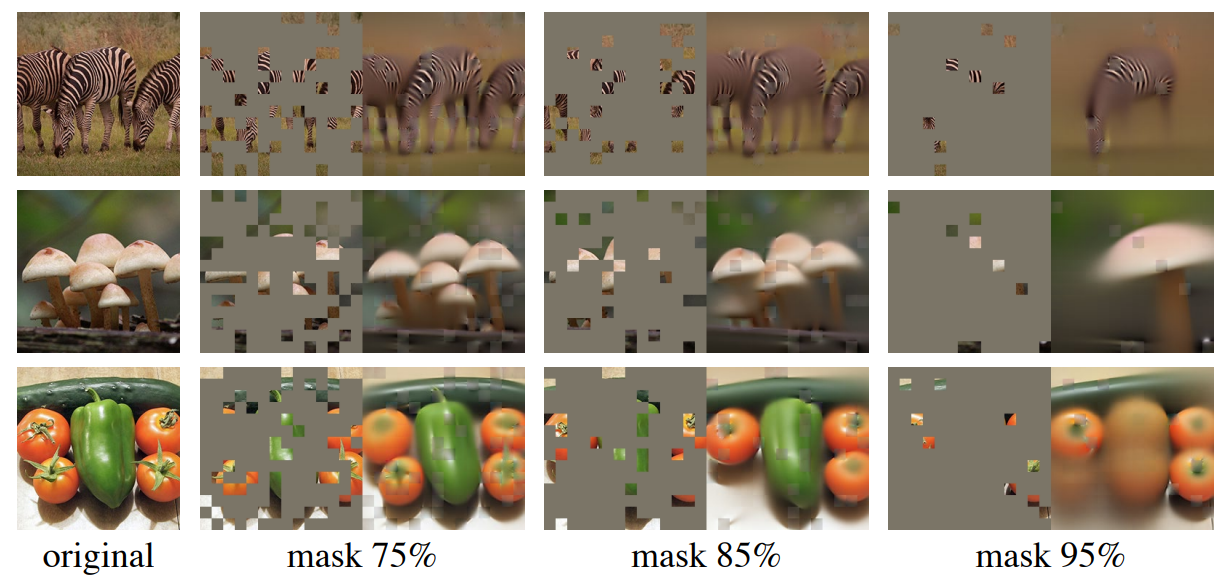
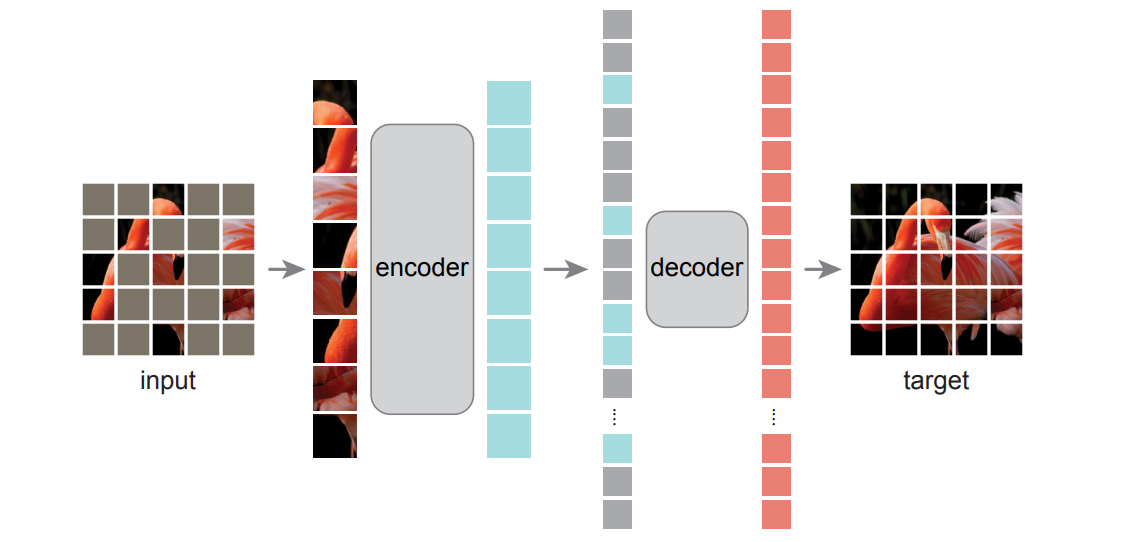
在 transformer 成功迁移到 CV 之后(VIT,swinTransformer),bert 等自监督训练的模型的迁移也开始被关注,虽然在 VIT 论文的末尾作者已经讨论了相关的可能性,但是 VIT 当时并不看好这种自监督的训练。这篇 MAE 大胆地进行了自监督训练图像的尝试,MAE 以一种非常简单的策略:遮挡某些 patch 后输入 VIT 得到隐空间表征,再通过另一个 VIT 解码全部图像,从而使 AE 学会表征语义信息。这是非常常见的 AE 训练策略,但是 MAE 做了 75% 以上的遮挡,构建了非常困难的任务场景,却得到了远超预期的结果。
概览
创新
- 借鉴 bert,采用自监督的训练方式训练 transformer
- 对于 encoder,被遮挡的 patch 并不输入,这保证了在复杂度一定的情况下 encoder 可以更深
- 对于隐空间的向量,没有 mask 的向量将由同一个 0 向量表示,该向量可以训练
- 对于 encoder 和 decoder,两次加入位置编码(这里虽然和其他 transformer 不一样,但是没做消融实验)
网络
这篇论文的具体网络架构实在没啥好说的,就连代码也就 200 多行,不过由于这种简单的架构,我们在记录时基本可以把训练时的所有 trick 都试着看一看。这并非是不重要的,由于 VIT 在结尾也尝试了这种自监督的训练却没有好的结果,这种 bert 的迁移模型也有 BEiT 等工作,但偏偏 MAE 以非常简单的策略比其他的效果都要好,我认为一些超参数的设定,包括位置编码、某些变量的随机初始化分布,encoder 和 decoder 的层深,loss 的计算等细节部分可能对文章贡献更大。源代码见此。
初始化网络结构及参数初始化
这一部分关注与 encoder/decoder 及 encoder 之前的预处理部分,decoder 之前的预处理部分,包括如何打 patch,如何进行 random mask,以及 encoder/decoder 的一些参数。这里不多讨论具体 AE 做了什么,主要还是探讨一些初始化层。
首先是打 patch,这一部分和 VIT 完全没有任何区别,就是 VIT-base 的翻版,甚至直接 import 了 VIT 的实现,将 224x224 的图像打成多个 16x16 的 patch。
1 | self.patch_embed = PatchEmbed(img_size, patch_size, in_chans, embed_dim) |
然后 MAE 做了一个 mask 操作,具体的操作之后再说,总之在 mask 之后,原本 196x1024 的输入现在变成了 49x1024。接下来 MAE 完全按照 bert 来,也加了一个 CLS,然后加入 position embedding。具体来说,embedding 之后的维度为 1024,同时 pos 并非可学习的,而是直接采用 consin 编码方式,这一点和原始 transformer 一致。CLS 并非全零 tensor,而是服从 (0,0.2) 的正态分布。对于 decoder,也是同样的位置编码方式和反 embedding。
1 | #———————————————————————————encoder———————————————————————————— |
在这之后, MAE 选择了和 VIT 一致的 encoder,深度为 24,自注意力头数为 16,MLP 隐层维度为 4x1024,接受 token 维度为 1024。这样就可以输入 encoder 然后得到 50x1024 的输出了。对于和 VIT encoder 结构一致的 decoder,深度为 8,自注意力头数为 16,MLP 隐层维度为 4x512,接受输入的 token 维度为 512。【论文里多次强调,这是一个非对称结构的自编码器,然而实际上这里的非对称并非体现在框架算法上,更多的是 transformer 的层数和维度的大小】
1 | # MAE encoder specifics |
encoder
在上面已经讨论过的一些模块的基础上,我们可以快速梳理 encoder 的前向过程,具体的过程直接在代码中注释说明
1 | def forward_encoder(self, x, mask_ratio): |
在上述代码中我们仅有一处一笔带过,即 mask,接下来我们详细分析 mask 函数
1 | def random_masking(self, x, mask_ratio): |
decoder
这里的大部分操作是非常简单的,简单讲一下 decoder 的过程:首先复原和原本一样多的 patch ,复原方法是将其余被遮住的 patch 用同一个向量表示,这个向量进入计算图。然后加入位置编码,进入 transformer,出来之后过一个 Norm 和线性投射层,移除 CLS 后返回。
需要注意的是,在 李沐 的视频中,他说 decoder 是可以看到未经过 encoder 也未经过 mask 的原 patch,但实际上通过读源码我们发现并不能看到原图。这是因为在 李沐 出视频的时候 KaiMing 还没有放出来源码。同样的,李沐 在视频中抛出疑问:decoder 中是否所有部分都要加位置编码?有这个疑问是因为在没有被 mask 的 patch 中,其实本来就是有位置编码的,这样相当于加了两次。但实际上就是加了两次,又由于没有消融实验,我们无法判断两次加入位置编码是否对这项工作起了关键作用。
1 | def forward_decoder(self, x, ids_restore): |
loss
网络的 loss 比较普通,选用常见任务对应的损失,这里因为是自监督的训练,选了个 MSE,也是自监督非常常见的损失选择,不过是最后加了一个针对 mask 的处理,并不复杂。
1 | def forward_loss(self, imgs, pred, mask): |
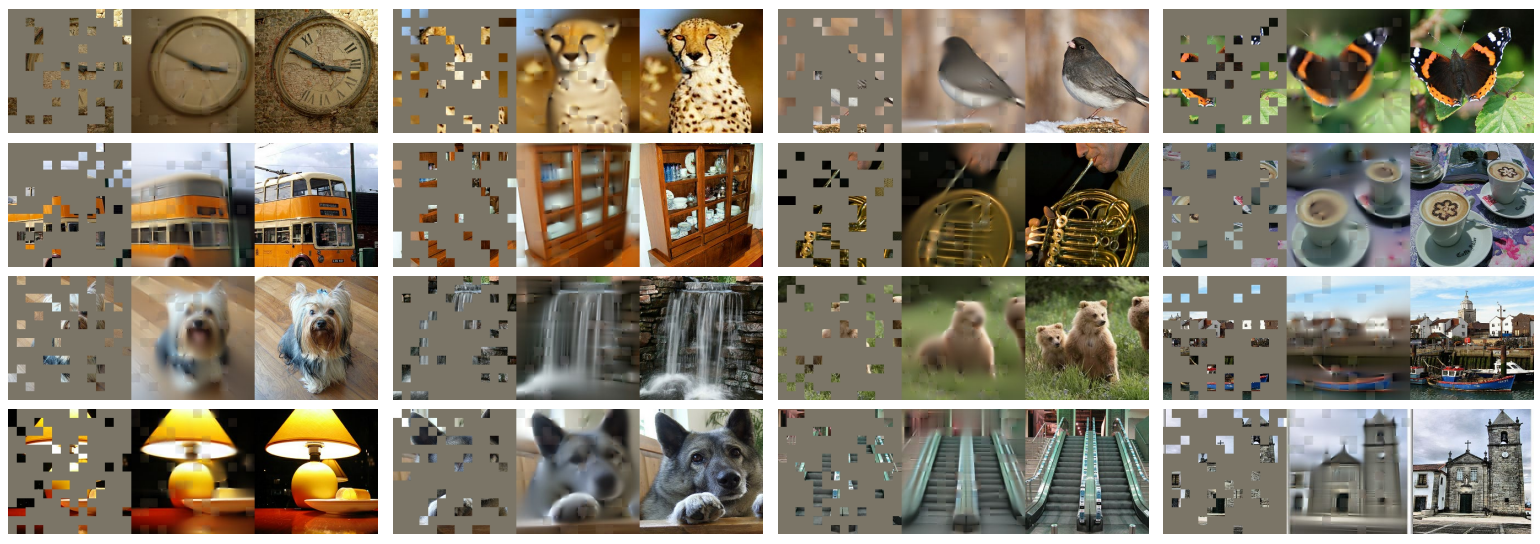
结果
结果是这项工作最重要的部分了,因为纵观这篇 paper,10 页之中只有 1 页讲了具体做了什么,其他全部在说我们为什么这么做,我们做出来有多么好,尤其是我们做出来多么好的结果这方面,真的占据了很大的篇幅,并且这结果确实让人直呼震惊,叹为观止。

启发
自从 transformer 出现之后,基于此产生的工作层出不穷,首先在 NLP 领域,transformer 被加入了自监督的训练方式,造就了 NLP 领域通用的预训练 baseline,如 bert,GPT 等。自从 2021 年之后,transformer 在 CV 领域也开始逐渐大放异彩,在诸多迁移的文章中,VIT 是首个将原生 transformer 用于 CV 领域的成功研究,这项研究让人们认识到,就算不针对图像做特殊处理,transformer 也可以和 CV 领域的传统老大哥 CNN 掰手腕,VIT 的同年,MSRA 提出了 swinTransformer,在多领域完成了对 VIT 的扩展,并几乎取得了所有的 SOTA。在这之外,针对 bert 等自监督训练模型向 CV 领域的迁移也开始进行,其中最成功的,甚至成功地有点过分的,就是这篇 MAE,即带掩码的自编码器。神奇的是,这个结果好得出奇甚至有点玄学的工作,在国外没有引起太大的反响,或许是因为网络设计真的太简单,但是单从结果上看,这项工作给人带来的震惊不逊于 KaiMing 的另一个工作 ResNet,嗷现在也有 ResNext 了。这俩大道至简了嗷属于是。